
便携式制氧机使用微型电机就可制氧!便携制氧机,因为要随时携带,所以需要微型压缩机的速度稳定、噪声低、能效高。
便携制氧机是在传统插电制氧机的基础上进行小型化。主要将传统的基于交流异步电机的压缩机,改为基于直流无刷电机的微型压缩机,工作电压在12~24V,并且使用锂电池供电,小小一个背包在身,一般可以连续4个小时以上供氧。
PID算法是在1936年完整提出的,它是一种在自动控制技术中占有非常重要地位的控制方法。PID控制理论从诞生之日就和电机深深捆绑在一起,时至今日,有电机的地方,一般背后就有PID的身影,例如空调、无人机、机器人等等。
I:Integral积分,它的作用是将一段时间内的误差E(t)累加起来,累加的值越大,输出电压U(t)越大,也就是如果速度长时间只存在一点点误差,P比例单元不好控制,等一段时间后,I积分输出足够大的电压,速度才被修正过来,这会有延时。
D:Differential微分,它的作用是将当前的误差E(t)和上一次的误差E(t-1)相比较,如果E(t)更大,误差就有越来越大的趋势,就增大电压U(t)将速度预先修正。
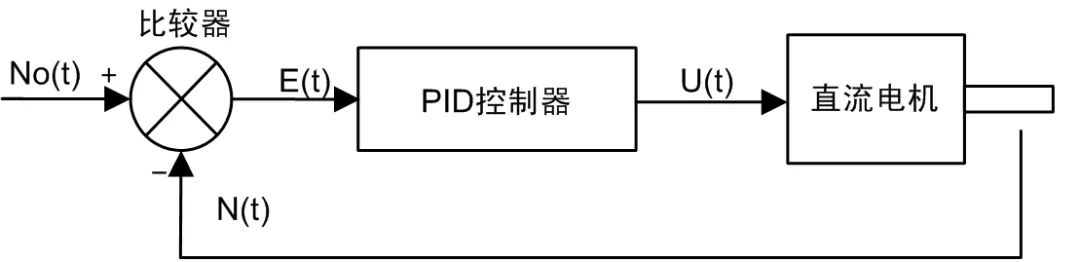
PID是否有“事后诸葛亮”的感觉?P、I、D中每个单元都要等误差出现才做事,没误差就不做事,误差大就调整大,误差小就调整小。这会导致控制反应慢。
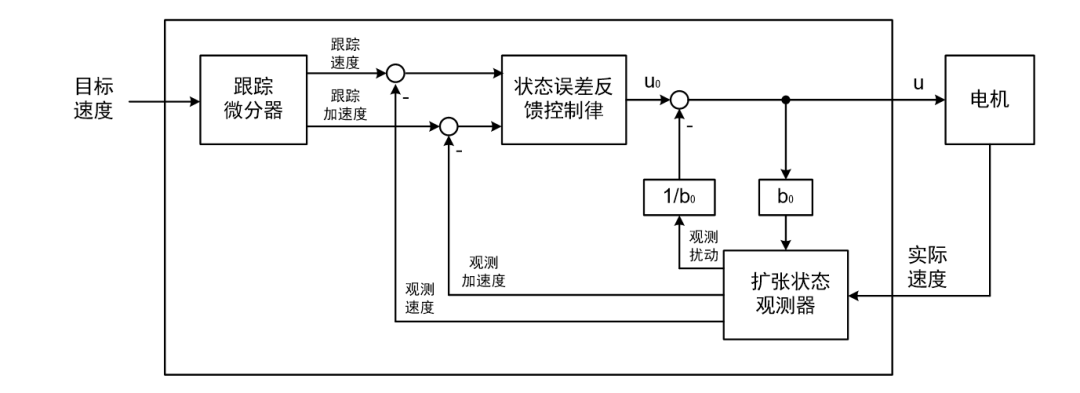
跟踪微分器
状态误差反馈控制律
扩张状态观测器
ADRC的特点
1. 速度稳定
无油空气压缩机的工作过程就是要来回压缩、排气,电机在压缩空气时遇到的阻力极大,而排气时阻力几乎为零。如果FOC采用PID算法控制速度,在这种情况下速度无法很好地稳定,而ADRC依靠扩张状态观测器,观测出扰动(阻力变化)后自动补偿,速度波动可以减低5~10倍。如下图,12V无油空气压缩机,同样工作在1000RPM(转/分), PID调速的速度波动在40~50RPM,而ADRC在3~5RPM。采用ADRC的便携制氧机,工作时的震动更小、噪声更低。
PID由于调节速度时“需要速度误差”,所以在加速或减速过程中,往往会“跑过头”,之后才“发现错误”修正回来,这个现象称为超调,并且在加速、减速的过程中,实际速度往往无法完全跟随参考速度,这个时候需要更大的电流去调节。ADRC首先依靠扩张状态观测器修正误差,然后跟踪微分器跟踪着加减速,最后采用工业的S形加减速控制,让实际速度和参考速度几乎完全重合,需要的电流也更小。下面是24V医疗风机的对比图,因为PID在加速和减速时,实际速度无法跟上参考速度,电源需要5A以上,而ADRC 实际速度和参考速度几乎完全重合,电源只需3A。采用ADRC控制算法的便携制氧机将更省电。